
隨著國(guó)民經濟的迅速發展和城(chéng)市(shì)化進程的加速,中(zhōng)國(guó)基礎設施和交通路網建設不斷擴(kuò)大和完善,橋梁逐漸成為現代(dài)交通不可(kě)或缺的重(chóng)要組成部分,對於人們的(de)生產和生活發揮著越來(lái)越重要的作用。據交通運輸部(bù)統計,“十三五”期間中國(guó)建成鐵路橋梁14039座、總裏程8864.1公裏;截至2022年底,中國公路橋梁數(shù)量(liàng)已達96.11萬座,位(wèi)居世界首位。我國已從名副(fù)其實的交通大國闊步邁向交通強國。
在複(fù)雜(zá)惡劣的外界環(huán)境及載荷(hé)的(de)長(zhǎng)期作(zuò)用下,大型基礎設(shè)施不可(kě)避免出(chū)現損傷積累,特(tè)別是橋墩的損傷會給整個橋梁的完整性和安全性造成嚴重影(yǐng)響,若不能及時發現其病害並(bìng)進(jìn)行幹預,很有可(kě)能會引發橋梁的坍(tān)塌事(shì)故。通過對橋墩的病(bìng)害檢測,可以及時發現橋(qiáo)墩的缺陷和損傷,並(bìng)采取修(xiū)複或加固措施(shī),延長橋梁的使用壽命,降(jiàng)低維護成本,提高橋梁的經濟效益和社會效益。同時能夠對橋墩的結構安全進行(háng)評估,為橋墩的維護(hù)和管理(lǐ)提供科學(xué)依(yī)據。
橋墩(dūn)表觀病害檢測方法主要包括人工檢查法、無人(rén)機巡檢法與爬壁機器人檢測法。人工檢查法是通過檢測車的吊(diào)籃或桁架裝(zhuāng)置將檢測人員及(jí)設備送到橋墩(dūn)附近進行觀測,此方法會耗費大量人力物力,存在檢測精度低、效率低下等缺點。而無人機巡檢法在進(jìn)行橋墩表麵病害檢測時因受到拍攝距離的限(xiàn)製,存在無法平穩懸停與續(xù)航的問題。現有的爬(pá)壁機器人在病害檢測過程中仍然需要人工進行機器人的運動控製或路徑規劃,無法保證(zhèng)其運動精度。在橋墩表(biǎo)觀(guān)病害智能無損檢測中,目前尚無穩定(dìng)、高(gāo)效的病害檢測係統,嚴重製約著橋(qiáo)墩病(bìng)害檢(jiǎn)測技術的進步。因此,急需(xū)研(yán)發新型橋墩病害檢測係統,改進和解決目前橋墩病害檢測的不足。在傳統機器(qì)人動力學的基礎上,本文結合多足協(xié)同(tóng)控製算法與機器視覺,構建了墩柱結構環形可重構攀爬作業檢測機器人,提出了基於環形視覺掃描的橋墩(dūn)全(quán)域病害圖像獲取(qǔ)新技術,研發了相關樣機與產品,有效推動(dòng)了我國橋墩病害檢測技術的(de)進(jìn)步。
墩柱結構表觀病害檢測機器人新技術
機器視覺是使計(jì)算機係統(tǒng)能夠模擬和理解人類視覺係統的學科。它結合了計算機科學(xué)、圖像處理、模式識別和人工智(zhì)能等多個領域,旨在開發算法和技術,使計算機能夠感知(zhī)、分析及理解圖像或(huò)視頻數據。
基於以上原理,長安大學的一支研發團隊研發了一種墩柱結構環形(xíng)視覺掃描攀爬(pá)作業檢測機器人係統(以下(xià)簡稱墩柱攀(pān)爬檢測機器人),設計了可重(chóng)構環形框架機器(qì)人,並根據其特點,開發出多足(zú)協同(tóng)運動控(kòng)製平台,保障環形(xíng)框(kuàng)架機器(qì)人的(de)平穩爬升,最後搭載多模式病害圖像獲取(qǔ)係統,實現了對橋墩(dūn)病害的非接觸、全域、高效檢測。
墩柱攀(pān)爬檢(jiǎn)測機器人係統主要由環形框架機器人本體、多(duō)足(zú)機器人控製(zhì)係統、多模式病(bìng)害圖(tú)像獲取係統、信息交互係統組成,係統總體框圖如圖1所(suǒ)示。環形框架機器(qì)人本體包含可重構環狀架體以(yǐ)及多個爬行機構,它(tā)是病害圖像獲取係統(tǒng)的載體,是整個係統的結構支撐;多(duō)足機器人控製係統通過多足協同控製算法(fǎ),為每個爬(pá)行機構分配速度,保證機(jī)器人能夠平穩爬升;多(duō)模式(shì)病害圖像獲取係統為多通道圖像采集單元、環帶麵陣(zhèn)相機掃描單元(yuán)及環帶線陣CCD掃描(miáo)單元,可實現(xiàn)對(duì)病害圖像的高(gāo)清(qīng)獲取;信息交互係統(tǒng)包含係統工作模式及相關工作參(cān)數的設置,實現整個檢測(cè)係統的協調控製;圖像處理與病害識別係統包含對病害(hài)圖像的校正,病害的識別與量化,完成整個橋墩表觀病害的數字化(huà)建檔。
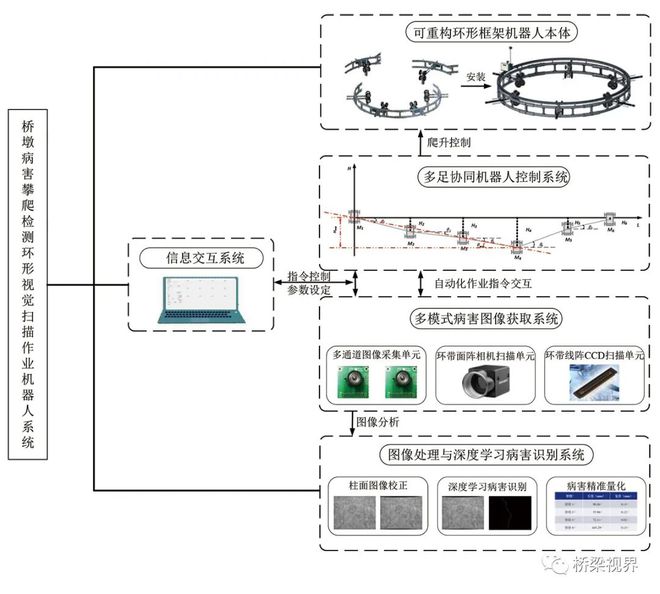
圖1 環形視(shì)覺掃描攀爬作業檢測機器人係(xì)統總體框圖
墩柱攀爬檢測機器人係統具有如下技術特點:
1.便捷性好。環形框架機器(qì)人采取分體式結構的設計,保證(zhèng)機器人拆卸與運輸時的便捷性。
2.適應能力強。可以實現對直徑1.2m-1.5m、柱體上(shàng)下直徑變換≤70mm範(fàn)圍內所有墩柱結構(gòu)的檢測。
3.檢測效率高。以10m橋墩為例,進行(háng)一次無盲區檢測,時間不超過40分鍾(zhōng),且係統(tǒng)具備自動(dòng)化作業能力。
4.檢測精度高。可實現0.1mm精度級別的病(bìng)害檢測。
5.定位誤(wù)差小(xiǎo)。位置(zhì)定位誤(wù)差垂直方向(xiàng)不(bú)超過±5cm,水平方向不超過±5mm。
6.通訊能力強(qiáng)。機器人與(yǔ)地麵上位機之間的(de)通訊距(jù)離≥500m。
7.病害識別速度快。網絡模型識別病害速度(dù)快,可達(dá)20張/ s。
基於機(jī)器(qì)人動力學與機器視覺的墩柱攀爬檢測機器人係統結構簡單、安裝(zhuāng)方便、抗幹(gàn)擾能力強、檢測精度高。係統可以兼容大(dà)多數墩柱結構的(de)檢測,包括直徑(jìng)並不統一的墩柱結構。在圖(tú)像采集係統安裝了補光燈板,在采集圖像時(shí)會自動開啟,不(bú)受光線的限製,可實現全天候、惡劣天氣下的橋梁(liáng)病害的(de)檢測。采集的(de)圖像通過SD卡(kǎ)保存至工控機內,當檢測(cè)結束後可拆卸下來,便於後期的圖像處理與分析(xī)。
工程應用
墩柱攀爬(pá)檢測機(jī)器人
性能測試
為驗(yàn)證作業機器人控製(zhì)係統的可靠性,在西安市滻灞區廣運橋進行了(le)墩柱攀爬檢測機器人性能測試,包括機器人的爬升平穩性測(cè)試、爬升高度的(de)精準性及爬升速度測(cè)試。驅動(dòng)環形框架機(jī)器人運動,通過計(jì)算各個從電機相對於主電機的高度偏差來測試機器人的爬升平穩性。通過比較環形框架機器(qì)人的目標爬升高(gāo)度與實際(jì)爬升(shēng)高度來測試爬升高度(dù)的精準性。現場組裝如圖2所示,機器人性能測試實驗如圖3所示。

圖2 現(xiàn)場組裝

圖3 機器人性能測試實驗
測試結果表明,機器人爬升過程中,各(gè)個從電機相對於主電機的高度誤差均在±5cm內,沒有出現傾斜程度過大的情況,且運動控製(zhì)平台會對機器人運行姿態(tài)進行實時糾(jiū)正,實現了機(jī)器人的平穩爬升。環形框架機(jī)器人實際爬升高度有時略小於期望爬升高度,但誤差最大僅為3cm,爬升(shēng)10m高的橋墩進行全域(yù)圖(tú)像采集的總時間不超過40分鍾(zhōng)。實驗(yàn)表明視覺掃描檢測機器人爬升(shēng)過程穩定,爬升速度快,測試精(jīng)度高,極大(dà)地高了橋梁檢測的工作(zuò)效率。
病害圖像采集及病害
識別測試
壽春淮河特大橋位於安徽省淮南市,全長11.84公裏,其中主橋長440米,最大跨度200米(mǐ),是目前安徽省內跨度最(zuì)大的矮塔斜拉橋。壽春淮河特(tè)大橋部(bù)分墩柱出現大幅度表觀病(bìng)害(hài),使用視覺掃描檢測機器人進行了病害圖像采集測試與裂縫普查檢測,在軟件端實現對被檢測橋墩的實時圖像(xiàng)顯示與存儲。病(bìng)害檢測(cè)上位機軟件界麵如圖4所示。
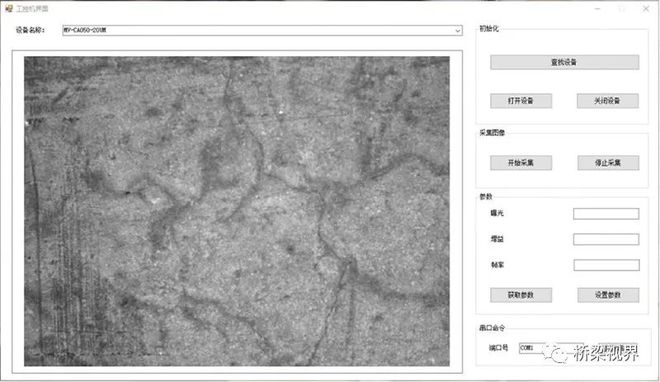
圖4 上位機軟件界麵
測(cè)試結果表明,攀爬機器人係統能(néng)將采集到的圖像按位置信息(xī)保存在工控機中。針對龐大的橋墩表觀病害圖像,通過構建墩柱結構表觀病害數據(jù)集來訓練深度學習病害識別模型。經過訓(xùn)練(liàn)後的網絡模型可以精準地識別橋(qiáo)墩圖(tú)像中的(de)病害(hài),並輔以圖像處理算法進行病害的精準量(liàng)化(huà),並在(zài)軟(ruǎn)件端實現了被檢測橋梁(liáng)病害的(de)在線識(shí)別與數(shù)字化建檔。圖5為橋墩(dūn)病害識別係統軟件端,圖6為橋墩病害識別結果。
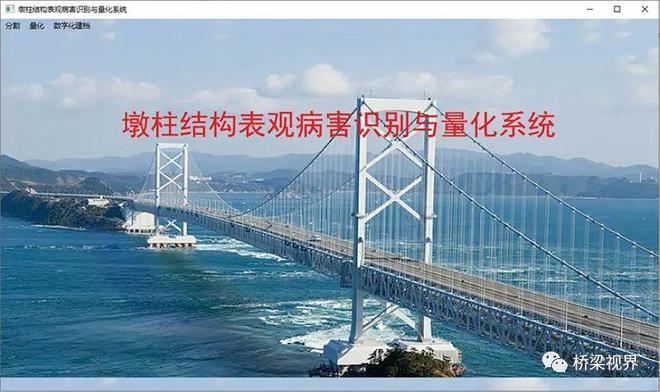
圖5 橋(qiáo)墩病害識別係(xì)統軟件(jiàn)界麵

圖6 橋墩病害識別結果
測試結果表明,基於深度學習與圖像處理的病害(hài)智能識別與量化係統,可以精準、快速地識別出橋(qiáo)墩表觀病害與數字化建檔。
綜上(shàng)所述,墩柱攀爬檢(jiǎn)測機器人係(xì)統能夠實現橋墩表觀病害圖像的全域采集(jí),基於深度學習(xí)與圖像處理的病害智能識別與量化係統,可以精(jīng)準、快速(sù)地識別出橋墩表觀病害與數字化建檔。墩柱結構(gòu)環形(xíng)視覺(jiào)掃描(miáo)攀爬作業檢測機器人係統為未來大型基礎設施(shī)的信息化提供了基(jī)礎,對提高墩柱結構的養護效率,保障(zhàng)墩柱結構的安全(quán)具有重要意義。
產品(pǐn)優(yōu)勢
基於機器人動(dòng)力學與機器視覺的墩柱攀爬檢測(cè)機器人係統,實現了墩柱結構表觀圖像全域采集,為墩柱結構表觀病害實時動態(tài)檢測提供一種新的手段。該技術具有穩定性好、實時性高、精(jīng)度高等優點,安裝方便、成本低等特點。
建立在深度學(xué)習與圖像(xiàng)處理基礎上的病害智能識別與量化係統,實現了病害(hài)圖像(xiàng)識別和分析,並進(jìn)行(háng)數字化建檔(dàng)。該技術具有病害識別速度快、病害精度(dù)高等特點,為未來橋墩數字孿生模型的構建及(jí)病害全生命周期演化追溯的研(yán)究奠定了堅實(shí)的基礎。
目(mù)前,墩柱結(jié)構環形視覺掃描攀爬作業檢(jiǎn)測機(jī)器(qì)人係統已在國內(nèi)大型橋梁工程的病害檢(jiǎn)測和周期性養(yǎng)護中推廣(guǎng)應(yīng)用,其優良的病害檢(jiǎn)測效果與性能指標得到應用(yòng)單位的高度認可,具有廣闊的工程(chéng)應用前景和技術推廣價值。
本(běn)文刊載 / 《大橋養護與運營(yíng)》雜誌
2023年 第3期 總第23期
作者 / 王(wáng)會峰 趙煜(yù) 杜浩
作者單位 / 長安大學





